





Positive-Displacement Motors (PDM) make use of a power generation section which is made up of a rotor/stator combination. In order to move a rotor part, a PDM requires hydraulic power from drilling fluid flowing through the power generation part. With a PDM, the stator and rotor work in tandem in the same way that gears do. The stator acts as the outer gear, and is made from a moulded elastomer featuring at least two lobes. The OD of the elastomer is protected by a secure metal casing. The rotor is positioned within the stator, and acts as an internal gear. This rotor is made of metal, and will have one less gear or lobe than the stator. Because of this difference, a cavity is created which is filled with drilling fluid when the PDM is downhole. This cavity acts as a wedge when it is put under pressure, and because the drilling fluid itself can’t be compressed, the force applied to the top of the wedge causes the rotor to move.

Figure 1 – Mud Motor
Given the helical shape of the rotor, such an application of force causes the rotor to rotate. As with a turbine, this rotation is then transmitted to the drive shaft and from there on to the drill bit. A seal around the cavity is produced as a result of contact between the OD of the rotor and the ID of the stator, as seen in Figure 2. This means that torque is applied to the rotor in order to overcome the resistance caused by the bit/formation interface and contact resistance between internal motor components.

Figure 2 – Mud motor rotation (Wikipedia, 2018)
In a turbine, torque and bit speed are dependent on each other; this is not so within a PDM. However, an exception to this rule is where the rotor is “nozzled” (when a bore through the rotor is used to divert a portion of the drilling fluid). As per the theory , torque is proportional to differential pressure (which increases at the surface as WOB increases), as bit speed is also proportional to the flow rate. The torque is proportional to the cube diameter of the motor, and the speed is inversely proportional to this same factor. Therefore, power is proportional to the square of the motor diameter. A function of the stator/rotor sliding speed during rotation is the speed limitation of the PDM. This is also affected by the drilling fluid velocity through the cavities.
The rotor/stator configuration is what controls the torque/bit speed relationship as seen in Figure 3 . When the number of rotor/stator lobes increases from the single lobe arrangement of conventional motors to multiple lobes, the bit speed will decrease, while the torque production will increase. This allows for the optimization of torque and bit speed, which is needed for roller-cone bits and drag-type PDC bits. Normal PDMs cannot meet these output necessities.

Figure 3 – Mud Motor Configuration, RPM, Torque Relationship (directionaldrillingart.blogspot.com, 2017)
Components of PDM
This information below explains main components of PDM.
Dump Valve
The by-pass valve, or dump valve, is shown in Figure 4 below. It is used to allow drilling fluid to fill the drillstring from the annulus when it is tripping into the wellbore, or to drain it when it is tripping out. Thanks to this valve, the bottom of the wellbore maintains a constant pressure, which helps to prevent control problems during trips.
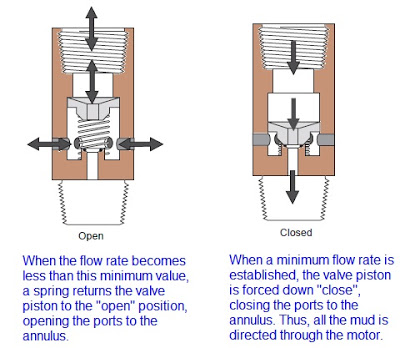
Figure 4 – Dump Valve(directionaldrillingart.blogspot.com, 2017)
Power Section
In the power section (Figure 5), the spiral shaped rotor produces rotation when the drilling fluid force acts upon it. Should the bit/formation resistance to rotation (known as the drilling torque requirement) be too great, then the drilling fluid can potentially cause the elastomeric material of the stator to become deformed temporarily. The division or seal between high and low pressure is then lost, which causes the motor to stall. As the pressure inside each cavity decreases from leakage of fluid volume past the lost seal, there will be a significant pressure increase at the surface. This means that the motor needs to be lifted off the bottom, and then restarted. Should the stall not be properly corrected, the stator will be permanently damaged, and the life of the overall motor reduced. This is especially important when working with higher flow rates or high differential pressures. Less applied differential pressure will mean fewer stalls.

Figure 5 – Power Section (Dyna-Drill.com, 2018)
The center axis of stator and rotor are not identical. The offset between these two center points is known as “eccentricity”. When the rotor turns within the stator, its axis moves around that of the stator. One full rotation around this stator access is called a nutation or precession. To find a PDM’s precessional speed, one must multiply the rotational speed by the number of rotor lobes. This process is, in effect, a gear reduction mechanism, and accounts for why the bit speed will decrease when the rotor/stator lobe configuration is increased.
The stator itself is formed out of a steel tube, lined with elastomer, and with spiraled lobes which correspond to the rotor. The material needs to be rigid enough to withstand abrasion and wear from the solids in the drilling fluid, but also flexible enough to provide enough of a seal on the rotor. It is therefore necessary to find some midpoint between these two demands. The materially also needs to be minimally affected by the numerous chemicals in the drilling fluid, as well as normal operating temperatures. It is vital that the elastomer bonds properly to the steel casing. It needs to be completely clean, to allow for effective adhesion.
After this is done, the elastomeric material needs to be pumped into its proper place, to prevent air pockets developing between the elastomer and its casing, as well as within the elastomer itself. Finally, an intricate curing process needs to take place. Although this is considered proprietary, it is nonetheless similar to the procedures used to heat-treat various metals.
Power Curves
PDM Power Curves are an extremely useful source of specific data when required drilling parameters are known. There are four major parameters displayed on the Power Curve format used here:
- Output Torque (foot-pounds)
- Output Rotational Speed (revolutions per minute)
- Total Pressure Drop (pounds per square inch)
- Drilling Fluid Flow Rate (gallons per minute)
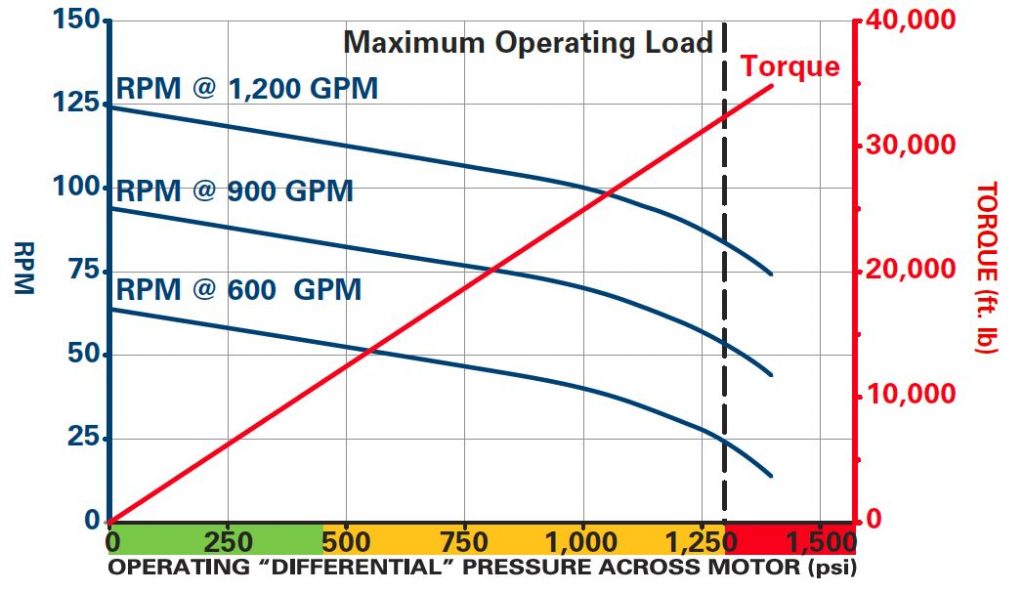
Figure 5 – Power Cure of Mud Motor (Halliburton, 2018)
These graphs refer specifically to a stated design (i.e. a rotor/stator configuration), and one where water is used as the fluid medium. Should a fluid of a higher density or viscosity be used, the torque and pressure drop will subsequently be higher. Using weighted fluid will have an impact on the parasitic (free-running) pressure losses which are a part of the total pressure drop. Said parasitic pressure losses are in part a result of contact between the particles of barite which is used to raise the density of the fluid. When the drilling fluid weight goes up, so too does the amount of solid particles and thereby the particle-to-particle contact.
In addition, if a fluid is used which is more viscos than water, the torque output will be larger than the one indicated by a water-based curve. This is because thicker fluids result in a better seal between rotor and stator, maximizing the differential pressure that may be applied. Given the direct relationship between torque production and applied differential pressure, higher differential pressure across the PBM means there will be greater torque production than that shown on the Power Curve, as the seal is improved.
Transmission Assembly
The Transmission Assembly takes care of the eccentric rotation, or precession, of the rotor, which needs to be stabilized within the stator when the mechanical energy reaches the bit. On top of this purpose, the transmission assembly will also absorb some of the hydraulic thrust which originates in the power section, and transmit the generated torque to the drive or output shaft. There are multiple designs used in the drilling industry to achieve this purpose.

Figure 6 – Transmission Assembly (http://steelmakingmachine.com, 2017)
Bearing Assembly
Bearing assembly which consists of radial and axial thrust bearing supports a transmission assembly. The bearing assembly transmits rotational force from the the transmission assembly and support both trust load and radial bending load while drilling.

Figure 7 – Bearing Assembly
There are two types of bearing assembly.
- Oil Sealed Bearing Assembly – This type is recommended to use when corrosive drilling fluid is utilized, there is a lot of LCM to be pumped through the BHA or it is required to have very low pressure drop across the bit.
- Mud Lubricated Bearing Assembly – This type use some of mud flowing through the bearing assembly. Typically, it is about 4 – 10% of mud which is used to lubricate and cool the shaft and bearings.
Adjustable Bend Housing
An adjustable bend housing (figure 8) connects a bearing assembly to a stator and it also provides protection to a transmission assembly. The bending on a mud motor can be adjusted in order to achieve a required build rates while sliding. If the angle is set at 0 degree bend, it is normally used to improve drilling performance in a vertical well since a bit will spin faster than a rotary drilling.

Figure 8 – Adjustable Bend Housing (http://drillingknowledge.blogspot.com, 2018)
References
Inglis, T.A. (2010) Directional drilling. Dordrecht: Springer-Verlag New York.
Mitchell, R.F., Miska, S.Z. and Aadnoy, B.S. (2012) Fundamentals of drilling engineering. Richardson, TX: Society of Petroleum Engineers.
Short, J.J.A. (1993) Introduction to directional and horizontal drilling. Tulsa, OK: PennWell Books.
Technical, T., Astier, B., Baron, G., Boe, J.-C., Peuvedic, J.L.P. and French Oil & Gas Industry Association (1990) Directional drilling and deviation control technology. Paris: Editions
En.wikipedia.org. (2018). Mud motor. [online] Available at: https://en.wikipedia.org/wiki/Mud_motor [Accessed 28 Apr. 2018].
Directionaldrillingart.blogspot.com. (2018). SDMM – An Introduction. [online] Available at: https://directionaldrillingart.blogspot.com/2015/10/sdmm-introduction.html [Accessed 28 Apr. 2018].
Dyna-drill.com. (2018). dyna-drill.com. [online] Available at: https://www.dyna-drill.com/power-sections [Accessed 28 Apr. 2018].
Halliburton.com. (2018). SperryDrill® and SperryDrill® XL/XLS Positive Displacement Motors – Halliburton. [online] Available at: http://www.halliburton.com/en-US/ps/sperry/drilling/directional-drilling/matched-systems/sperrydrill-and-sperrydrill-xl/sperrydrill-and-sperrydrill-xl-xls-positive-displacement-motors.page [Accessed 28 Apr. 2018].
Steelmakingmachine.com. (2018). Downhole Drilling Motor,Downhole Tools,Energy Conversion Device Manufacturer. [online] Available at: http://steelmakingmachine.com/6-1-downhole-drilling-motor.html [Accessed 28 Apr. 2018].
Drilling, S. and man, h. (2018). Steerable Downhole Mud Motor – Directional Drilling. [online] Drillingknowledge.blogspot.com. Available at: http://drillingknowledge.blogspot.com/2017/11/steerable-downhole-mud-motor.html [Accessed 29 Apr. 2018].

important & Short details explained , Thanks.